Fab Deltabot
Fab Deltabot is a revolutionary platform for independent, live-controlled delta robots – a type of parallel robots designed for precise and fast movements of light payloads, generally used for pick-and-place/pack operations. The Fab Academy is a Digital Fabrication Program directed by Neil Gershenfeld of MIT’s Center For Bits and Atoms and based on MIT’s rapid prototyping course, ‘MAS 863: How to Make (Almost) Anything’. The Fab Academy started out as an outreach project from the CBA, and has since spread to Fab Labs worldwide. The program focuses on introducing unique means of instructing students towards advanced digital fabrication. Recently graduated from the University of Innsbruck, Alexander Nikolas Walzer, who is presenting the project for us, has attended the Fab Academy from February to June 2015 at the Green Fab Lab Valldaura and the Fab Lab Barcelona, located within the Institute for Advanced Architecture of Catalonia (IAAC).
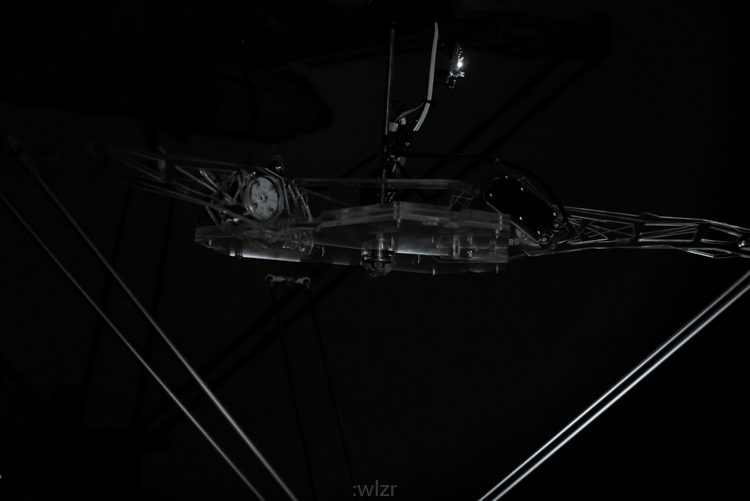
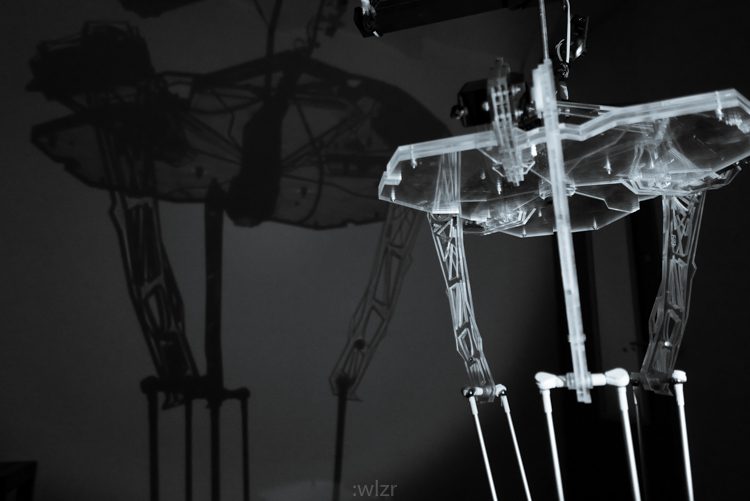
A delta robot is composed of three two-segment arms/legs mounted in 120 degree intervals. The arms and legs use parallelograms to restrict the motion of the “wrist”, the end effector. Wrist and elbow use ball magnets in order to keep the distance but not a certain angle. That is the magic of the kinematics and it’s interesting to watch how the position of the effector is constantly being negotiated between the three servos.

courtesy of Fab Academy – Alexander Nikolas Walzer
“My intention is to create a platform for Deltabots that are entirely fab-able (apart from servos and ball magnets probably). The interface is done in Processing Software and use serial communication to drive the servos and motors. I aim for an exchangeable end effector (you are able to attach any effector: extruder, drill/mill, brush, graffiti, light source, scanner, camera etc.) and for a scale bigger than desktop 3D printers and I can see also purpose in academia for an interactive machine like this. There are quite some Deltabots out there, DIY and industrial, servo and stepper motor based. I decided to go for a servo based one because it doesn’t require those massive pillars on each corner and you are free to decide to hang it, build a cage etc. I based the design upon many references I found around the internet and I will provide all the sources (3D Files, cutting and print files, code). The machine will operate with three arms/legs and on free and open-source software. The idea is scalable and ready to be modified and ideally hacked into something new/better.”  The lab held around 25 students from “different educational backgrounds, countries, different ages and ethics”, which created a mix of work strategies and ideas. “I think the main goal of the course – at least for me was less the final project but the whole process of making it, of rethinking as you discover new possibilities, new questions that arise every week, troubleshooting with computers and machines, human interaction and digital craft.” You can create your own or modify the existing machine, which is still currently under development, and make sure to watch the final video.
The lab held around 25 students from “different educational backgrounds, countries, different ages and ethics”, which created a mix of work strategies and ideas. “I think the main goal of the course – at least for me was less the final project but the whole process of making it, of rethinking as you discover new possibilities, new questions that arise every week, troubleshooting with computers and machines, human interaction and digital craft.” You can create your own or modify the existing machine, which is still currently under development, and make sure to watch the final video.

courtesy of Fab Academy – Alexander Nikolas Walzer
By: Alexander Nikolas Walzer and Lidia Ratoi










Lidia Ratoi is a Romanian architect, educator, and researcher, currently serving as Assistant Professor at the University of Hong Kong’s Department of Architecture. With a background in both architectural design and theory, her work explores the intersections of technology, media, and politics in the built environment. Ratoi’s research focuses on the aesthetics of power, surveillance, and virtuality, with a strong interest in critical and speculative design. She has practiced internationally and exhibited in venues across Europe and Asia. Passionate about challenging conventional narratives, Ratoi integrates digital tools with philosophical inquiry, encouraging experimental approaches to architecture. Her contributions continue to shape emerging discourses in design and architectural pedagogy.