Robot Builds Erosion Barriers, a team of researchers at Harvard’s Wyss Institute for Biologically Inspired Engineering has developed a robot that can autonomously drive interlocking steel sheet piles into soil. The vision of fully autonomous or unsupervised construction has long fascinated architects, especially in the context of remote environments or even space habitats.

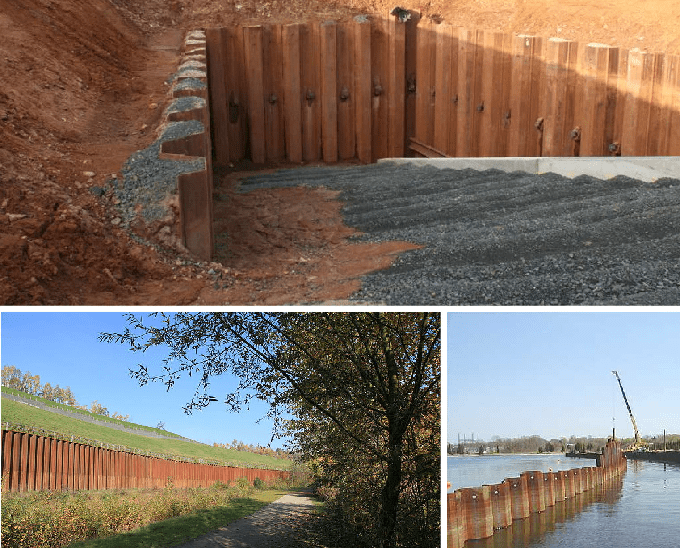
This idea has inspired many researchers in architecture and engineering to explore robot-enabled construction and fabrication techniques. However, so far there hasn’t been a solution for building foundations or otherwise anchoring into the ground, which is a requirement for useful structures. Automating sheet pile driving addresses this need.
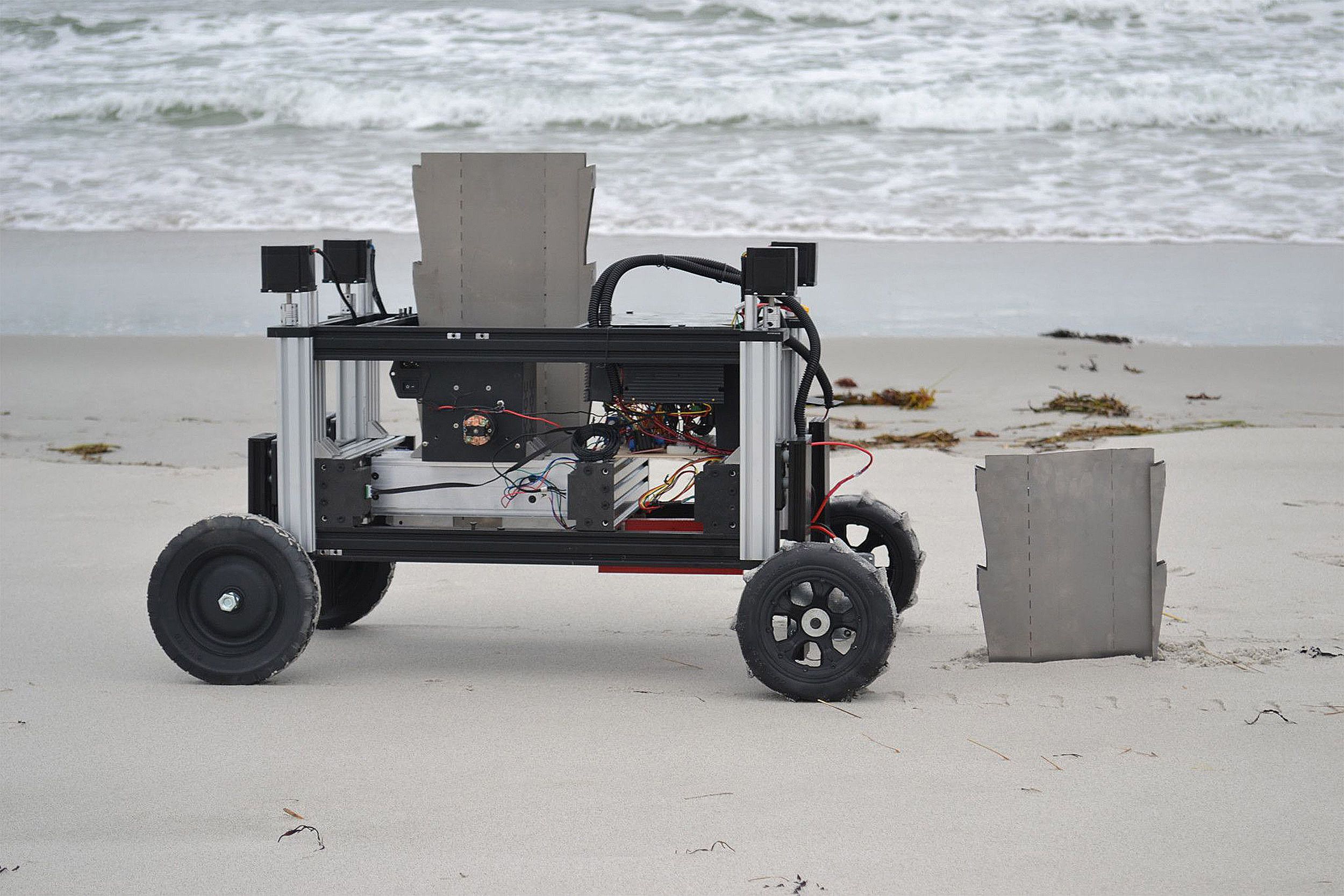
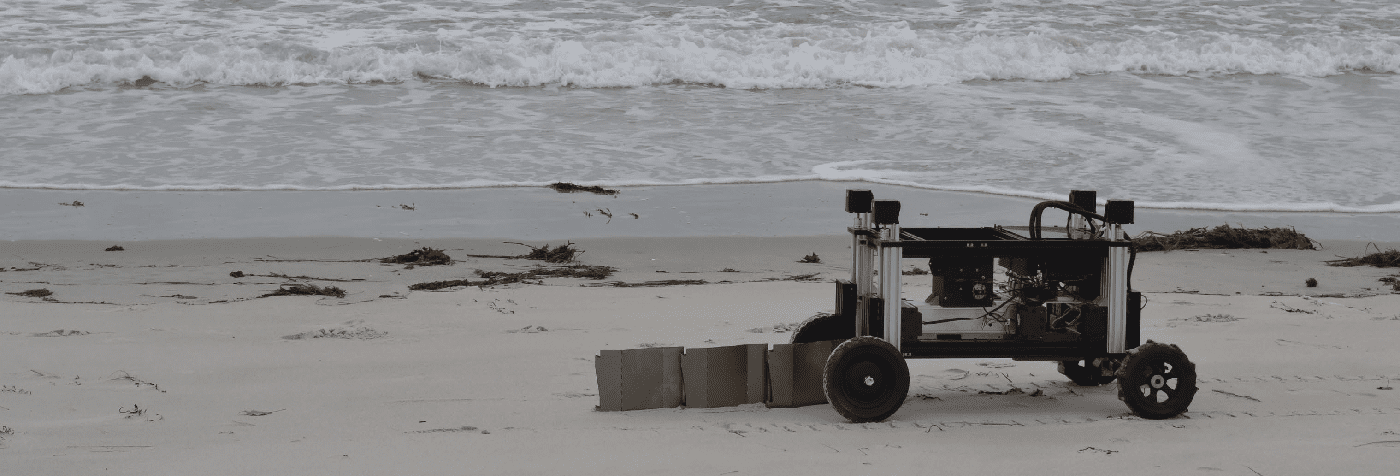
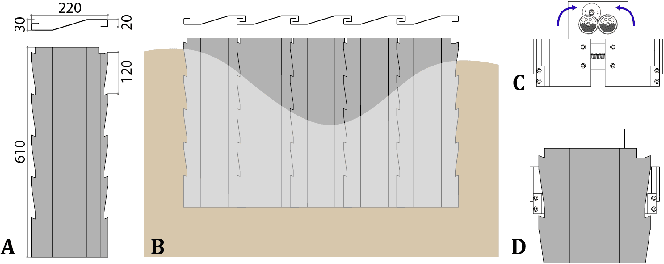
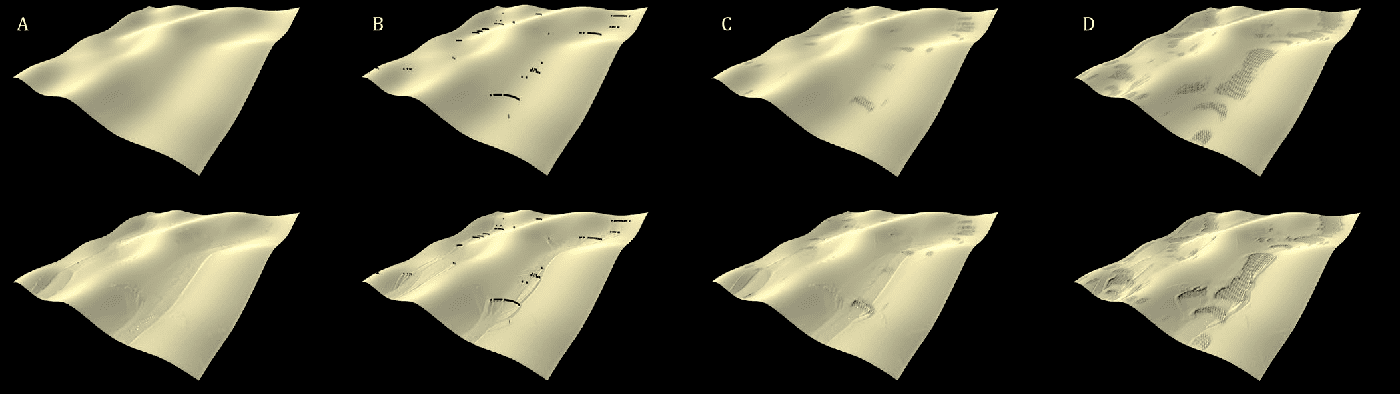
Researchers at the Wyss Institute have developed a robot designed to drive interlocking sheet piles into the ground to help stabilize the soil. Teams of such robots could help combat erosion, restore damaged landscapes, and facilitate sustainable land management in a variety of settings. Credit: Wyss Institute at Harvard University Conventional sheet pile driving processes are extremely energy-intensive.
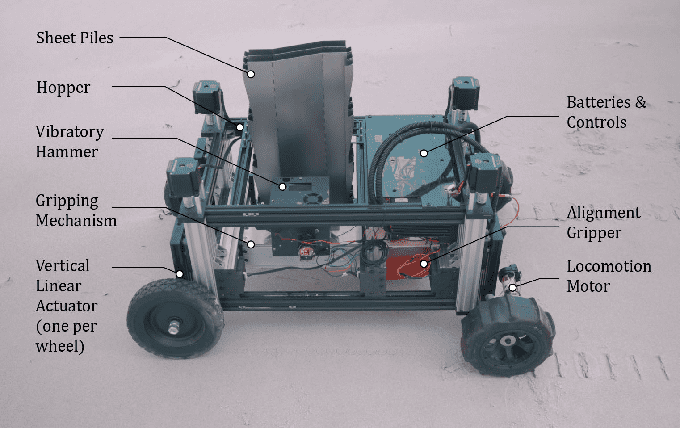
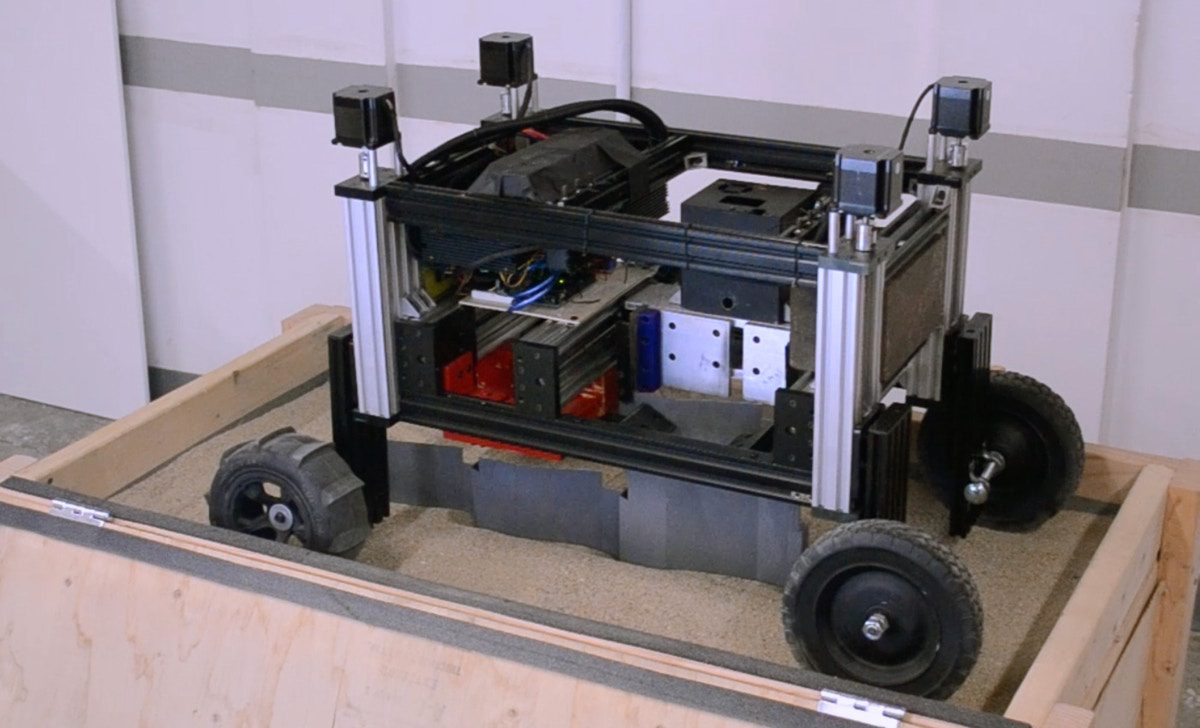
Only a fraction of the weight of typical heavy machinery is used for applying a downward force. The Wyss team’s “Romu” robot, on the other hand, is able to leverage its own weight to drive sheet piles into the ground. The project began as an exploration of methods for automated site preparation and installation of foundations for other robotic systems to build on; as it developed, the team determined that such interventions could also be directly applicable to land restoration tasks in remote environments.


Ibrahim Abdelhady is an architect, academic, and media entrepreneur with over two decades of experience in architecture and digital publishing. He is the Founder and CEO of Arch2O.com, a leading platform in architectural media, renowned for showcasing innovative projects, student work, and critical discourse in design. Holding dual PhDs in Architecture, Dr. Abdelhady combines academic rigor with industry insight, shaping both future architects and architectural thought. He actively teaches, conducts research, and contributes to the global architecture community through his writing, lectures, and media ventures. His work bridges the gap between practice and academia, pushing the boundaries of how architecture is communicated in the digital age.